 并联机械手、并联机器人以及蜘蛛手在快速面装盒装箱设备中的应用,体现了自动化技术在包装行业的广泛应用和重要性。以下是对这些设备在快速面装盒装箱设备中应用的具体分析:
并联机械手、并联机器人以及蜘蛛手在快速面装盒装箱设备中的应用,体现了自动化技术在包装行业的广泛应用和重要性。以下是对这些设备在快速面装盒装箱设备中应用的具体分析:
一、设备概述
-
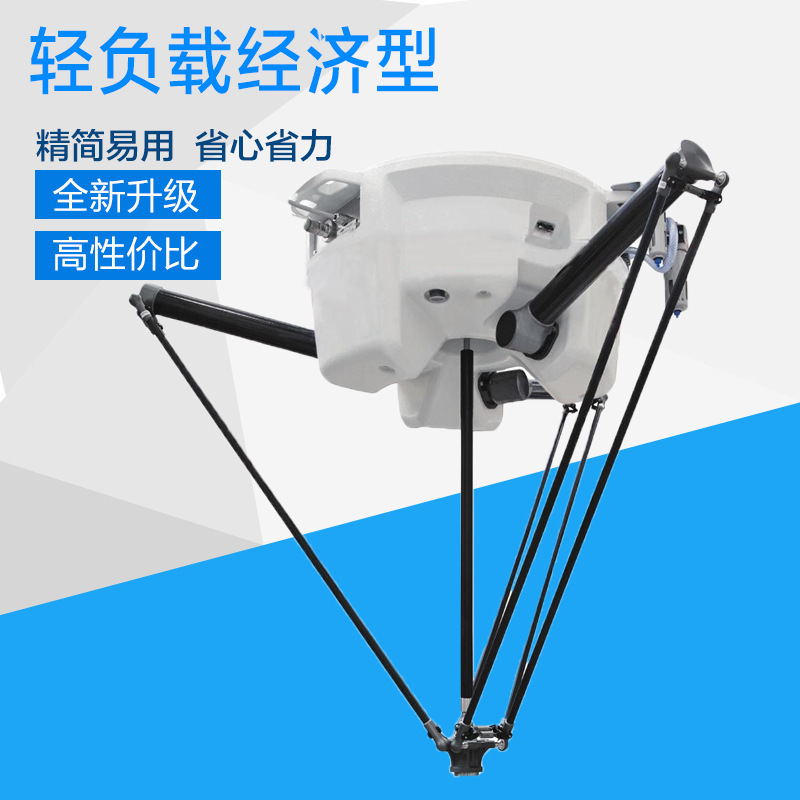
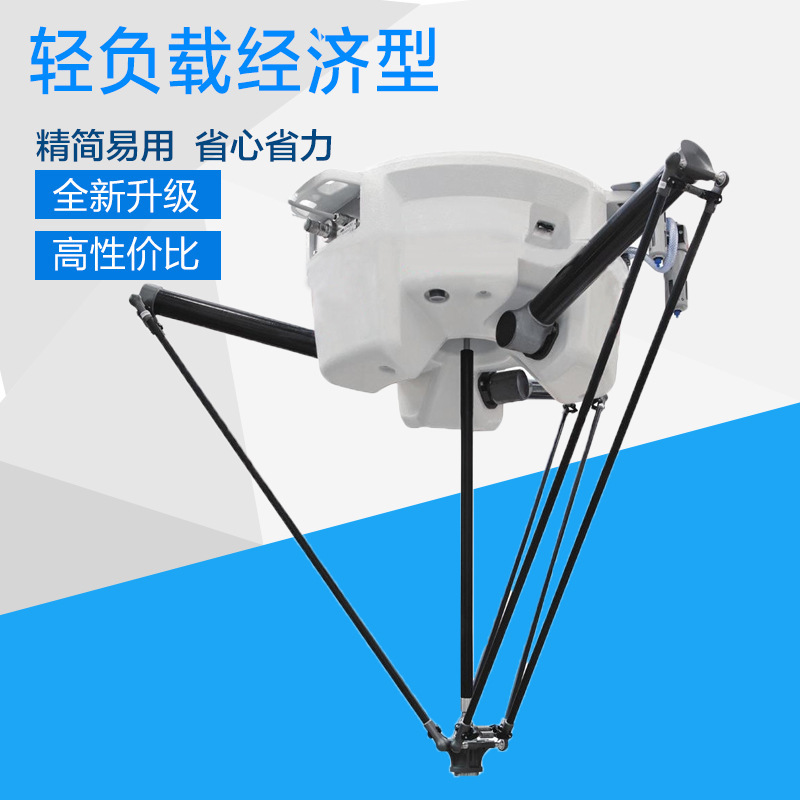
并联机械手:是一种采用并联机构设计的机械手,具有结构紧凑、刚度大、精度高、速度快等特点。它通常用于高速、高精度的抓取、搬运和分拣等作业。
-
并联机器人:是并联机械手的一种高级形式,通常具有更多的关节和更高的自由度。它能够完成更复杂的空间作业,如三维空间的平移、旋转和抓取等。
-
蜘蛛手:是一种具有多关节、多自由度的机械手,其形态和结构类似于蜘蛛的腿。它通常用于需要高精度、高灵活性和高速作业的场合,如食品、医药、日用品等行业的包装和分拣。
二、技术特点与应用优势
-
高精度与高速度:
-
这些设备通常采用高精度的传感器和执行机构,能够实现高精度的定位和抓取。
-
在快速面装盒装箱设备中,它们能够准确地抓取面条并将其放入包装盒中,确保产品的质量和稳定性。
-
同时,它们具有高速运动的能力,在高速生产线上能够快速地完成面条的抓取、搬运和分拣等作业,提高生产效率。
-
多关节与多自由度:
-
这些设备具有多个关节和自由度,能够完成复杂的空间作业。
-
在快速面装盒装箱设备中,它们能够适应不同形状和尺寸的包装盒,以及不同品种和规格的面条。
-
易于维护与保养:
-
这些设备的结构相对简单,易于维护和保养。
-
它们通常采用模块化设计,方便更换和维修故障部件。
-
智能化与自动化:
-
现代并联机械手、并联机器人和蜘蛛手通常配备先进的控制系统和智能算法。
-
能够实现自动化作业,减少人工干预,提高生产效率。
-
还可以与其他自动化设备集成,形成完整的自动化生产线。
三、应用场景与案例
在快速面装盒装箱设备中,并联机械手、并联机器人和蜘蛛手的应用场景包括但不限于:
-
面条抓取与搬运:这些设备能够准确地抓取面条,并将其搬运到指定的位置进行包装。
-
包装盒定位与抓取:它们能够准确地定位并抓取包装盒,将其打开并放置在指定的位置。
-
面条装箱与码垛:在完成面条的抓取和包装盒的定位后,这些设备能够自动将面条放入包装盒中,并进行码垛操作。
四、市场趋势与发展前景
随着自动化技术的不断发展和普及,并联机械手、并联机器人和蜘蛛手在快速面装盒装箱设备中的应用将越来越广泛。未来,这些设备将更加注重智能化、自动化和柔性化的发展,以适应不断变化的市场需求和生产环境。同时,随着技术的不断进步和成本的降低,这些设备的应用范围也将不断扩大,为食品、医药、日用品等行业的包装和分拣提供更加高效、精确和可靠的解决方案。
综上所述,并联机械手、并联机器人和蜘蛛手在快速面装盒装箱设备中具有广泛的应用前景和重要的价值。它们能够提高生产效率、降低人工成本、提高产品质量和稳定性等方面发挥重要作用。