 并联机器人搭配视觉系统在颗粒袋入槽场景中的应用,特别是使用蜘蛛手执行器,已经成为自动化包装领域的一种高效解决方案。以下是对这一应用的详细分析:
并联机器人搭配视觉系统在颗粒袋入槽场景中的应用,特别是使用蜘蛛手执行器,已经成为自动化包装领域的一种高效解决方案。以下是对这一应用的详细分析:
在颗粒袋包装行业中,颗粒袋的整体生产流程包括一次包装(装袋和封边)、二次包装(装盒)以及中间的搬运和入槽环节。目前,前后端装袋机以及装盒机已经高度集成化、标准化。然而,受限于生产场地的布局(装袋往往在洁净室内完成而装盒区域相对开放)以及装盒机与装袋机出入料形式的不同(整列出料与层叠入槽),两者无法通过简单输送进行衔接。因此,需要一种高效的自动化解决方案来实现颗粒袋从装袋机到装盒机的无缝、无人化衔接。
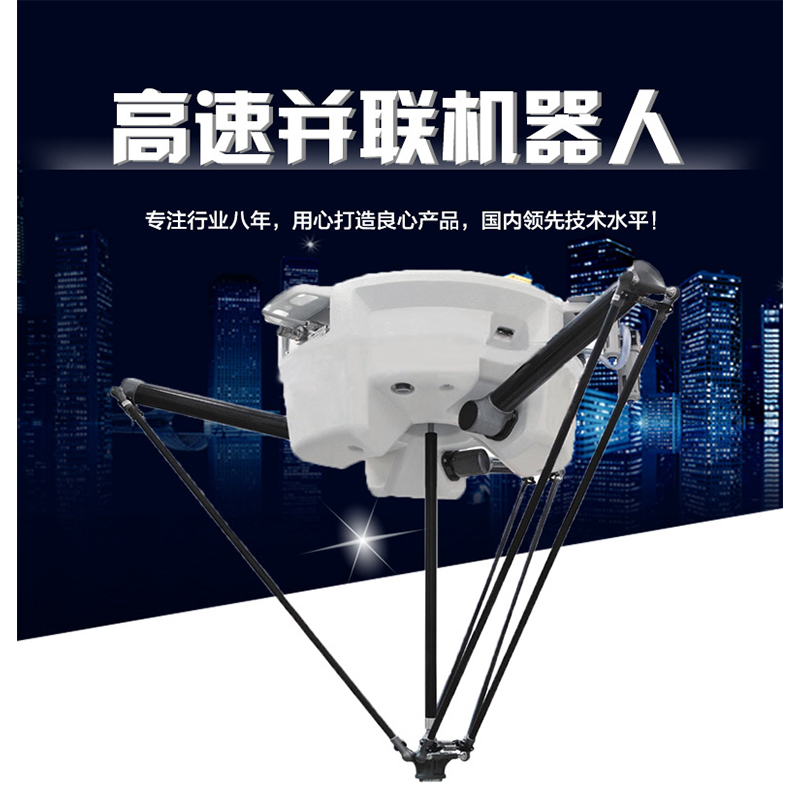
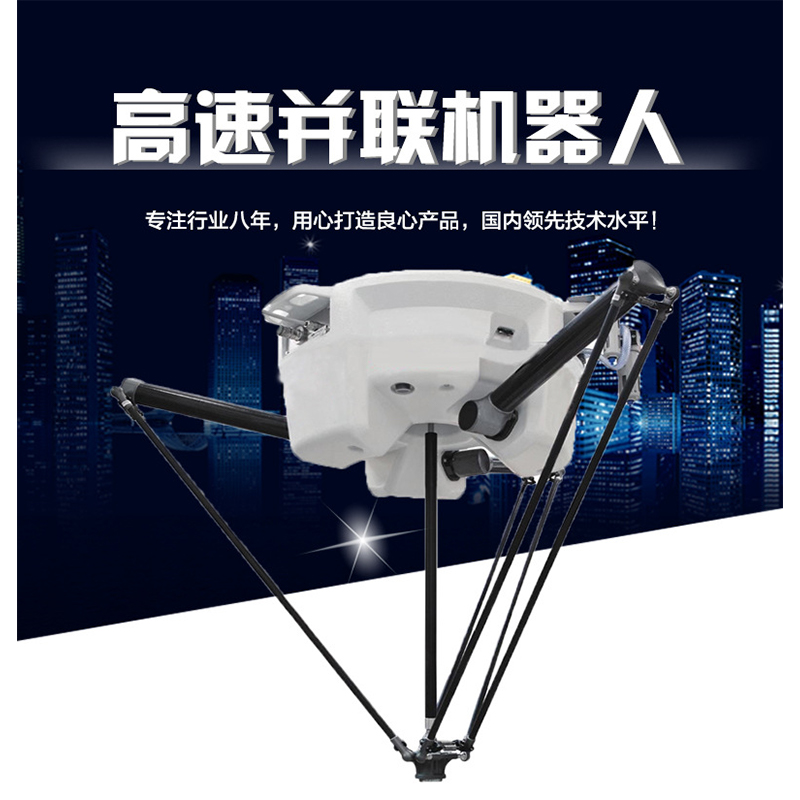
并联机器人以其独特的结构设计,能够在高速运转的同时保持高精度和灵活性,非常适合用于颗粒袋的入槽环节。同时,采用先进的视觉系统(如AtomVision等)及算法(如SmoothBlob等),能够同时对多列颗粒袋外形进行精准识别,识别率高达99.5%,确保后段抓取成功率。
蜘蛛手执行器是并联机器人在颗粒袋入槽场景中的关键部件。它可以根据单盒装入袋数以及摆放逻辑,采用不同形式的末端执行器,实现“多抓一放”功能。此外,蜘蛛手执行器还具备以下优势:
并联机器人结合视觉系统和蜘蛛手执行器,能够实现对颗粒袋的快速、精准抓取和摆放,大大提高了生产效率。同时,自动化解决方案减少了人工干预,降低了人工成本。此外,机器人易于维护和扩展,降低了长期运营成本。视觉系统的精准识别和蜘蛛手执行器的灵活抓取,还确保了颗粒袋在入槽过程中的准确性和稳定性,从而保证了产品质量。
并联机器人搭配视觉系统在颗粒袋入槽场景中的应用具有显著优势,是未来自动化包装领域的重要发展方向。这一解决方案不仅适用于颗粒袋包装行业,还可以推广至其他药剂(如胶囊、贴膏)的装盒以及食品(咖啡包、代餐粉)、日化(袋装清洁剂、干燥剂)等小型袋剂装盒的自动化改造中。
综上所述,并联机器人搭配视觉系统在颗粒袋入槽场景中的应用具有广阔的市场前景和重要的应用价值。随着工业自动化和智能制造的不断发展,这一解决方案将在更多领域得到广泛应用和推广。
电话:400-0000-000
邮箱: pasikebaoyang@163.com
地址:山东省,泰安市,肥城市泰临路301号


扫一扫关注公众号
